Mengenal Lebih Dekat Dengan Quadcopter
tanggal post : 21 December 2015

Hai BoBers, Mr. Bob kali ini akan membahas tentang Quadcopter. Salah satu jenis robot yang sedang pesat perkembangannya adalah drone atau robot terbang yang sering disebut sebagai pesawat tanpa awak atau UAV (Unmanned Aerial Vehicle). UAV sendiri terdiri jadi beberapa jenis dan yang paling populer sekarang ini adalah Quadcopter (atau kadang disebut Quadrotor), yang merupakan multicopter yang memiliki empat rotor (baling-baling). Quadcopter ini dapat terbang dengan dua cara yaitu terbang dengan cara dikontrol dan terbang otomatis .
Prinsip Kerja Quadcopter
Quadcopter memiliki empat baling-baling penggerak yang diposisikan tegak lurus terhadap bidang datar seperti pada gambar di bawah :

Masing-masing rotor (baling-baling dan motor penggeraknya) menghasilkan daya angkat dan memiliki jarak yang sama terhadap pusat massa pesawat. Dengan daya angkat masing-masing rotor sebesar lebih dari seperempat berat keseluruhan, memungkinkan Quadcopter untuk terbang. Kecepatan quadrotor tergantung pada kekuatan motor dan berat quadrotor itu sendiri. Kecepatan terbang quadrotor yang pernah saya coba adalah sekitar 9m/s.
Untuk menghindari terjadinya momen putar pada body, arah putaran baling-baling pada setiap rotornya berbeda. Terdapat 2 rotor yang bergerak searah jarum jam (CW) dan 2 rotor yang bergerak berlawanan arah jarum jam (CCW)

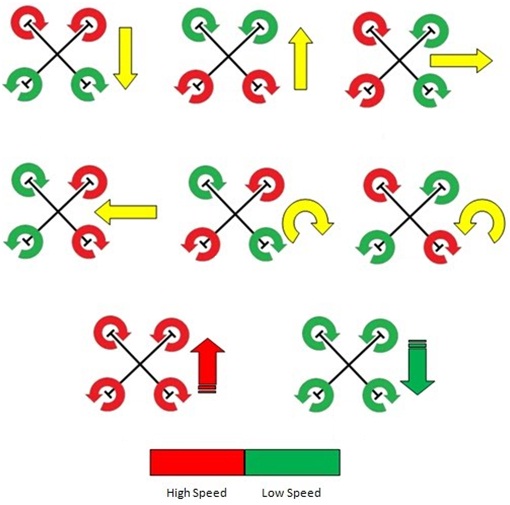
Gerakan Dasar pada konfigurasi X-Quadcopter:
Konfigurasi yang paling sering digunakan adalah X-quadcopter. Ketika quadcopter sedang terbang dan melayang di udara (hovering) kecepatan putar pada setiap rotornya adalah sama. Saat quadcopter melakukan gerakan maju, 2 buah baling-baling atau propeller yang berada dibelakang akan berputar lebih cepat sehingga body quadcopter akan miring ke depan. Gaya dorong yang dihasilkan keempat propeller akan mempunyai komponen gaya ke atas dan ke depan sehingga quadcopter akan terdorong ke arah depan sambil mempertahankan ketinggiannya. Berikut adalah ilustrasi gerakan pesawat yang dipengaruhi oleh kecepatan propeller.
Komponen Penting Quadcopter
1. Motor Brushless
Ini merupakan komponen utama, ada beberapa spesifikasi dalam memilih motor brushless untuk quadcopter, berikut paparannya:
- Motor brushless type outrunner (yang berputar bagian luar) dan ringan.
- KV motor sekitar 750-1200 KV.
- Gunakan tegangan kerja 11.1 volt (3 cells), alasanya adalah mudah mencari batery dengan spesifikasi 3 cells, harganya terjangkau dan tidak terlalu berat.
- Gunakan mounting motor brushless dengan tipe dibawah.
- Untuk pemula, motor dengan max current < 20 Ampere sepertinya sudah cukup.

Berikut ini salah satu contoh paparan mengenai thrust pada motor brushless. Contoh perhitungannya menggunakan 1100 KV dengan Spesifikasi Thrust: 850gr dan propeler 10×4.7 maka 1 motor menghasilkan 850gr, ambil nilai setengahnya yaitu 425gr, kemudian kalikan 4 menjadi 1700gr. Kesimpulannya jika total massanya adalah 1700gr maka dengan tenaga setengah dari motor, quadcopter sudah dapat terbang.
2. ESC (Electronic Speed Controller)
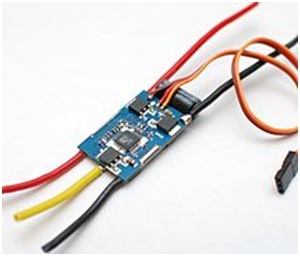
ESC memegang peranan penting dalam proses pengendali kecepatan dan arah putar dari motor brushless. Pemilihan ESC tergantung dari besar arus maksimal dari motor brushless, untuk kalangan pemula, pemilihan ESC dapat menggunakan dengan spesifikasi arus maximum 25 Ampere. Dan gunakan ESC yang dapat di program atau dengan kata lain programmable, seperti turnigy plush.
3. Propeller

Biasanya propeller dijual sepasang dengan arah putaran CW dan CCW. Pemilihan propeller disesuaikan dengan rekomendasi dari spesifikasi motor brushless tersebut. Kesalahan pemilihan berdampak besar terhadap trust yang dihasilkan oleh motor. Perhatikan ukuran propeller dan disesuaikan pula dengan dimensi quadcopter.
Umumnya ukuran propeller disebutkan sebagai kode, misalnya 10×4.7. Artinya, propeller tersebut memiliki diameter 10 inch dan pitch sebesar 4.7 inch
4. Kontroler
Ada banyak pilihan yang dapat kita gunakan sebagai kontroler pada quadcopter, untuk pemula seperti ane, KK Board dari Kapten KUK adalah pilihan yang cukup tepat.
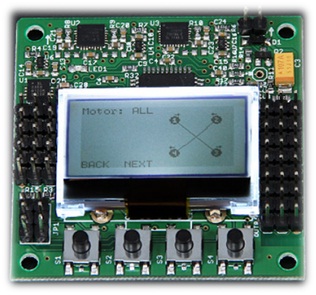
Namun seingat saya, FC (Flight Controller) ini tidak dilengkapi dengan accelerometer sehingga bisa menyebabkan drift ketika sedang terbang.
5. Frame

Untuk spesifikasi frame, pilihlah yang ringan dan kuat, anjuran ane beli dahulu saja atau buat sendiri dari bahan alumunium kotak hollow (seperti batang) dengan dimensi 1cm x 1cm atau 1″ x 1 ” yang mudah didapatkan di toko aluminium atau glodok. Sedangkan untuk bagian tengahnya (tempat peletakan kontroler) dapat menggunakan akrilik / PCB fiber.
Untuk bahan aluminium, jika jatuh dari ketinggian bisa menyebabkan bengkok tapi mudah untuk diperbaiki. Sedangkan jika menggunakan akrilik, bahan ini rawan pecah namun mudah untuk dibuat karena sudah banyak jasa laser cutting untuk akrilik. Dan jika menggunakan material PCB fiber, material ini cukup kuat namun agak sulit jika desain anda cukup rumit. Material ini bisa dipotong dengan CNC Router untuk desain yang agak rumit. Kalau anda punya dana lebih, tidak ada salahnya mencoba material Carbon Fiber. Material ini sangat kuat dan ringan tapi harganya cukup mahal.
Demikian Artikel tentang "Mengenal Lebih Dekat Dengan Quadcopter", Semoga bermanfaat buat para BoBers.
